�B�ʥͲz�g�T(��361��)
�v�T�]�B�g�٩ʻP�]�B���{���N�]��(January.2.2018)
�������B�L��ã
�@�@�]�B�N�@�����O�v�T�]�̶]�B�g�٩� (running economy) �P�]�B���{ (running performance) �����n���D�C
�@�@Saunders�� (2004) ���峹�����X�A�v�T�]�B�g�٩ʪ��ͪ��O�� (biomechanics) �]���A�]��
�H����q�� ( anthropometry)�B
�B�ʾǻP�ʤO�� (kinematics and kinetics)�B
�X�n�� (flexibility)�B
�a���ϧ@�ΤO (ground reaction force) ���CBarnes�PKilding (2015) ���峹�h���X�A�v�T�]�B�g�٩ʪ��D�n�ͪ��O�Ǧ]���A�]�A
�H����q�ǯS�x (�魫�P��q���G�B������סB��x�x�u [Achilles tendon moment arm])�B
�]�B����/�B�A�Ҧ� (�B���P�B�W�B�������T [vertical oscillation]�B�ۦa�Ҧ� [footstrike patterns])�B
�B�ʾ� (kinematics)�B
�ʤO�� (kintics)�B�H��
�X�n�����C
�@�@Moore (2016) ���L�h��s���ҾڡA���R���Q��]�B�g�٩ʪ��ͪ��O�Ǥ��b�]�� (intrinsic factors)�A�]�A�B�T�֩�̨ΨB�T3%�B���C���������T�B���j���L���w�� (stiffness)�B���C�U����ʺD�q�B�}�y���a�ɧ�p���L�����i�B��j���B�T���� (stride angle)�B�����a���ϧ@�ΤO (GRF) ��V�P�L���b�u����B�O�����u�\�ʡB���C���@�Ϋ��ܦ٦@�P���Y�B�H�α��ޮɸ��C�٦E�����A���Q���~�b�]�� (extrinsic factors)�A�h�]�A�]�c�P�a��í�w��IJ�B���}�λ��q�c���C���Q��]�B�g�٩ʪ��ͪ��O�Ǥ��b�]���A�]���a����IJ�ɶ��B�\�ʮɶ��B�����O�B�e��@�ΤO�B�߷F���סB�H�������`�٦@�P���Y���A���Q���~�b�]���h�p�B�ξ����C��L�����Υ������ͪ��O�ǡA�]�A�}�P���ߦb�ۦa�ɪ������Z���Bbraking / ��t�ɶ��B��IJ�a������t�B�Ķq(impulses)�B�\�ʴ��B�����ۦa���A�B�ũйB�ʾǡB�H�ΪѤ����ٹw�����ʵ� (�U��)�C�ɺv�T�]�B�g�٩ʪ��ͪ��O�Ǧ]���A�w�g���F���T�����Q�P���Q�k���A���@��]�B�нm�P�]�̨ӻ��A�ѩ�Ҷq���ܶ��ƶq�Ӧh�B�ӽ����A�n������γo�Ƕ]�B�N���v�T�]���A�T��O�۷��x�����u�@�C
�v�T�]�B�g�٩ʪ��ͪ��O�Ǧ]�� (Moore, 2016)
| �ĪG | ���b�]�� | �~�b�]�� |
| �ɶ��Ŷ� | �ʤO�� | �B�ʾ� | ���g�� |
���Q
�]�� | �ۿ�B��(��3%)
�֪��������T | ���j���L���w��
����GRF�P�L���b�u
�@�@���
�C�U����ʺD�q | ���a�ɸ��ֻL�����i
���j�B�T����
�O�����u�\�� | ���ޮɸ��C�٦E��
���C���@�Ϋ��ܦ٦@�P
�@�@���Y | �]�c�P�a��í�w��IJ
���}��q�c (<440g) |
�Ĭ�
�]�� | �a����IJ�ɶ�
�\�ʮɶ� | �����O(impact force)
�e��@�ΤO | �߷F���� | �����`�٦@�P���Y | �B�ξ� |
����
��
���� | �}�P���ߦb�ۦa�ɪ���
�@�@���Z��
braking / ��t�ɶ�
��IJ�a������t | �Ķq(impulses) | �\�ʴ�
�����ۦa���A
�ũйB�ʾ� | �Ѥ����ٹw������ | |
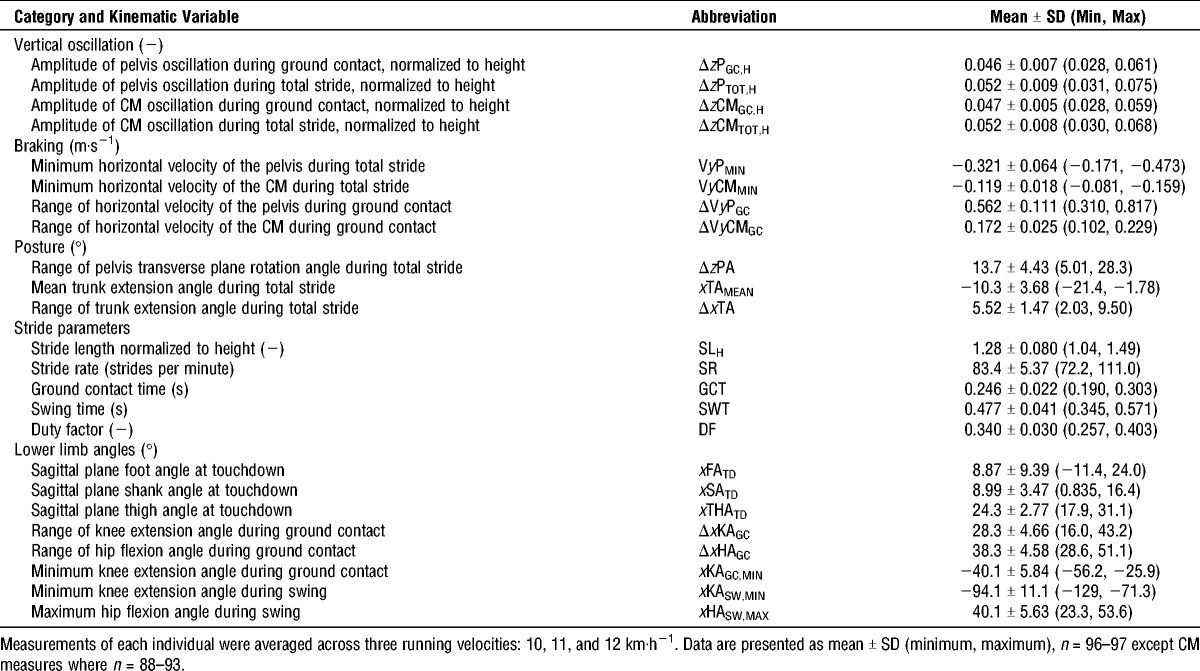
�@�@���F��M�v�T�]�B�g�٩ʻP�]�B���{���N�]���AFolland�� (2017) �H97�W (�k��50�W�B�k��47�W) �@�O�]�̬���H (���ժ�29�W�u�q�]�̡B68�W�]�̡A�䤤�u�q�k�k�]��29�W�A1�U���ئ��Z�b31�����P35�����H�U)�A�b���W�t�ת��]�B���W (10-12 km/h �t�סB�C�ӳt��4����)�A�i�椭���B�ʾǫ��� (�����\�ʡBbraking�B���աB�B�T�ѼơB�U�Ϩ��סA�@24���ܶ�) �����R�A�åB�i���q���� (locomotory energy cost, LEc) �B�Ż��H�� (velocity of lactate threshold point, vLTP) ������A�H�ζ]�B���{ (�@�U���ض]�B���Z) �������C
![�B�ʥͲz�g�T��361�� �v�T�]�B���{���N�]��](http://www.epsport.net/blog/photo/pic/201812123637.jpg)
�@�@�B�ʾǫ��Ъ�24���ܶ����A�����\�� (vertical oscillation) ���ܶ��A�]�����ֻP���ߦb�ۦa�ɪ��������T�GzP
GC,H�B�GzCM
GC,H�P��ӨB�� (total stride) ���������T�GzP
TOT,H�B�GzCM
TOT,H�Fbraking���ܶ��A�]�����ֻP���ߦb��ӨB�諸�̤p�����t��VyP
MIN�BVyCM
MIN�P�ۦa���� (during ground contact) ���̤p�����t�ףGVyP
GC�B�GVyCM
GC�F���� (posture) ���ܶ��A�]�A�߷F�b��ӨB�諸�������i����xTA
MEAN�P���d��GxTA�A�H�ξ�ӨB���b���ਤ�ףGzPA�F�B�T�Ѽ� (stride parameters) ���ܶ��A�]���зǤƪ��B��SL
H�B�B�WSR�B�ۦa�ɶ�GCT�B�\�ʮɶ�SWT�B�H�εۦa���� (duty factor, DF)�F�U�Ϩ��� (lower limb angles) ���ܶ� (�k��)�A�]�A�ۦa�����ڪ��� (sagillal plane) ���}�ۦa����xFA
TD�B�p�L����xSA
TD�B�j�LxTHA
TD�A�b�ۦa���� (during ground contact) �����`�����i���ףGxKA
GC�B�b���`�����Y���ףGxHA
GC�B�����`�̤p����xKA
GC,MIN�A�H�Φb�\�ʴ����̤p�����`����xKA
GC,MIN�B�̤j�b���`����xHA
SW,MAX�C
�@�@�w��@�U���إ������Z�b37��58����6��7���B43��31����6��54����97��k�k�]�̨ӻ��A��s���G��ܡA��19�Ӷ]�B�B�ʾǪ��ܶ��P�]�B�g�٩ʨ����۬����A��18�Ӷ]�B�B�ʾǪ��ܶ��PvLTP�����۬����A��11�Ӷ]�B�B�ʾǪ��ܶ��P�]�B���Z�����۬����C�z�L�j�k���R����k�o�{�A�ۦa�ɰ��֪��������T (�GzP
GC,H)�B�ۦa�����������`�̤p���� (xKA
GC,MIN)�B�H�ξ�ӨB��������֪��̤p�����t�� (VyP
MIN) �T���ܶ��A�i�H�����]�B�g�٩��ܲ��� (LEc) �F39.4%�C
�ۦa�����ڪ������p�L���� (xSATD)�B��ӨB��������֪��̤p�����t�� (VyPMIN)�B�ۦa���� (Duty factor, DF)�B�߷F���i���� (xTAMEAN) �|���ܶ��A�i�H�����]�B���{ (SB Time-z) �ܲ��ʹF30.5%�A�H�ΨŻ��H�� (vLTP-z) �ܲ��ʹF41.8%�C
![�B�ʥͲz�g�T��361�� �v�T�]�B���{���N�]��](http://www.epsport.net/blog/photo/pic/201812123636.jpg)
�M�w�]�B�g�٩ʡB�Ż��H�ȡB�]�B���{���B�ʾǦ]��(Folland��, 2017)
�@�@�ɺ]�B�N�������ܶ��A���M�P�]�B�g�٩ʡB�]�B���{��۬����A���O�i�@�B�i��j�k���R����o�{�A�v�T�]�B�g�٩ʻP�]�B���{���N�]���A���G�|�����P�C�ۦa�������֪��������T�B�\�ʴ��������`�̤p���P�]�B�g�٩ʤ�������p�F�ۦa�������p�L���סA��ӨB����������ֳ̤p�����t�סB�ۦa���� (duty factor)�B�H���߷F���i�����A�h�P�]�B���{�K�����p�C
�ޥΤ��m
Barnes, K. R., & Kilding, A. E. (2015). Running economy: measurement, norms, and determining factors. Bames and Kilding Sports Medicine - Open, 1(8), 1-15.
Folland, J. P., Allen, S. J., Black, M. I., Handsaker, J. C., & Forrester, S. E. (2017). Running technique is an important component of running economy and performance. Medicine Science in Sports and Exercise. 49(7), 1412-1423.
Moore, I. S. (2016). Is there an economical running technique? a review of modifiable biomechanical factors affecting running economy. Sport Medicine, 46, 793-807.
Saunders, P. U., Pyne, D. B., Telford, R. D., & Hawley, J. A. (2004). Factors affecting running economy in trained distance runners. Sports Medicine, 34(7), 465-485.



![B ʥͲz Ǻ Ǥƶ] B V m](../../blog/photo/pic/20181022105806.jpg)





![���Ӧ����z���]��](http://www.epsport.net/blog/photo/pic/2020725011225.jpg)